[統合的運動生成概念]
制御と自己組織化
いつもありがとうございます。
コラムで統合的運動生成概念,本日は「制御と自己組織化」について考えていきます。
神経リハビリテーションという言葉は,いまでは当たり前に耳にするようになっています。
治療結果に対する考察を神経科学に求めるようになってから,
脳はどうやって人の運動を制御しているのかと頭を悩ませている臨床家も多いと思います。
そうなると,運動制御と名の付く本を探し求め,
運動制御を理解することが,人の運動を理解することだと信じて疑わなくなってくるでしょう。
わたしもその一人でした。
しかし,この制御という言葉には,実は大きな落とし穴が存在しているのです。
「制御」という概念では,
暗黙裡のうちに制御主体(制御する側)と,制御対象(制御される側)とが分離されています。
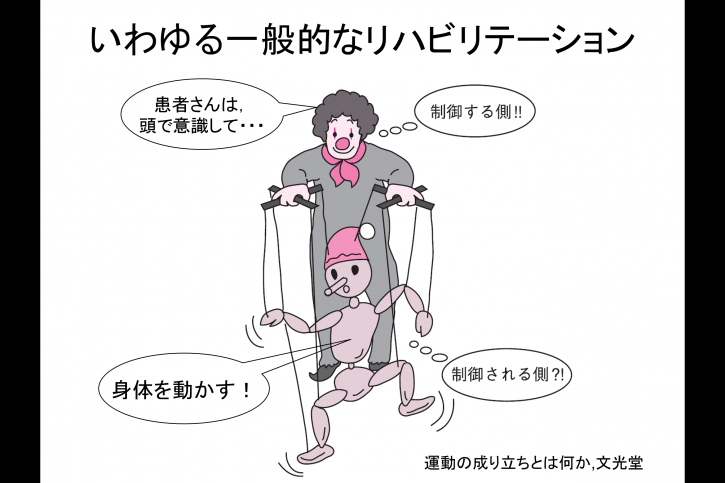
運動制御という考え方の根底には,
脳を制御主体,身体を制御対象とする仮定が内在しています。
大脳などで運動の計画やフィードフォワード制御に必要な信号の生成が行われ,
脊髄などで筋肉の収縮を通じて実際に生じた運動のフィードバック制御が行われるという制御理論は,
半ば常識的な考えとして現在のリハビリテーション教育に浸透しています。
でも,よくよく考えてみますと,
意識的・無意識的に関わらず脳が人の運動のすべてを制御できているとすれば,
その延長線上で人間のような形をしたニューマノイドロボットの設計ができるのではないかという期待が当然のように生じますよね?
日本人が夢見た鉄腕アトムは近い将来完成するでしょうか・・・・?
1996年に日本が誇る革命的なロボットが発表されました。
世界のホンダが開発したヒト型二足歩行ロボット,ASIMOです。
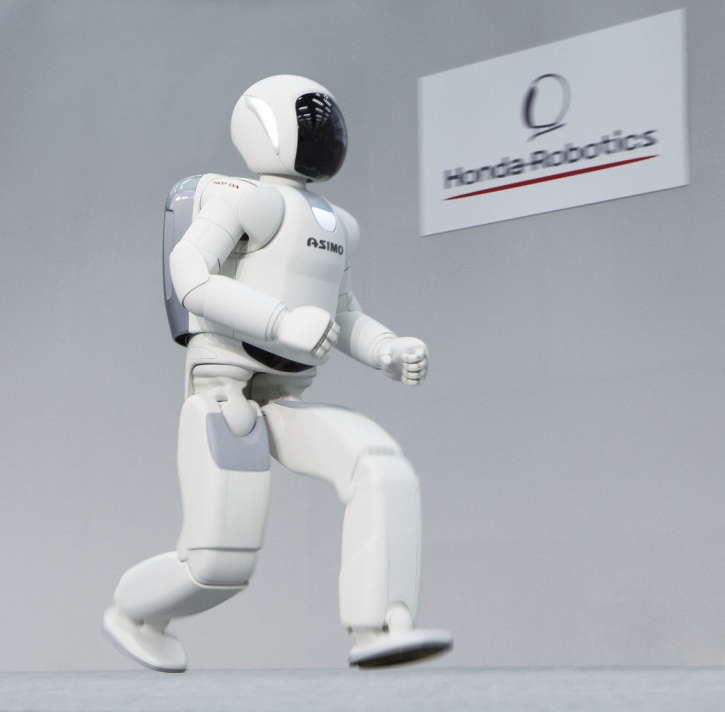
二足歩行することはもちろん,
軽快に走ってみせ,階段を昇り降りし,凸凹道でも安定して歩行し,
人をよけながら歩けるその姿は,今まで開発されたどんなロボットよりも洗練されており,
見るものを魅了しました。
21世紀にならなければ無理だと思っていた我々にとってそれは衝撃の事実でした。
確かに見事な二足歩行です。
が,我々が夢見た鉄腕アトムの姿はそこにはありません。
どうしても人の歩行には見えないからです。
テレビを賑わすニュースの中には,世界各地で発生した痛ましい災害映像が流されているが,
例えば,この二足歩行ロボットが人間の変わりに災害現場の作業をすることが出来るでしょうか?
未知の現場で,その状況に適応した作業を効率よく遂行することなど,
コンピューター制御ではプログラムできるはずもありません。
歩行だけではなく,人の運動を考えたとき,制御理論には根本的な問題点があります。
第一に,人間の身体は非常に多くの自由度があり,運動軌道計画の最適化が困難なこと。
第二に,身体の力学的な不安定性が顕著であり,安定性の保証が難しいこと。
第三に,環境の不確定な変化にリアルタイムで適応することが難しいこと。
我々は運動の専門家である,と前述しました。
人の運動について,制御理論では破綻してしまうのであれば,
それに基づいて治療を展開していては運動の真理に近づけないと思いませんか?
ですから,これまで通りの考え,では矛盾が生じてしまうことに気が付かなければなりません。
その運動の場面や要素を分解して理解するには,じつは限界があるのです。
「運動は,姿勢の連続である」という考えや,
神経・筋・骨・関節を部分的に切り取って問題点を抽出する,
還元的な手法や観点を疑わなくてはならない時が来ています。
制御理論とは対極にある考え方,それが自己組織化理論である.
自己組織化とは,
無秩序状態の系において,外部からの制御なしに秩序状態が自律的に形成されることをいいます。
言葉だけではむずかしいですね。
ここでいう「外部からの制御なしに」とは,
外部から細かく手を加えてパターンを作成するような作用がないということを意味します。
ベルンシュタインの時代から,
人が持つ冗長な自由度の問題を克服することが運動であると言われてきました。
人の構造こそ無秩序状態の系といえます。
筋や骨だけではない,
中枢神経系のニューラルネットワークや,
上皮組織,結合組織などの様々な構成要素から,
ため息が出るほどに美しい運動が織り成されます。
運動とは,外部から細かく手を加えずとも自律的に形成されるのです。
この考えを我々の臨床に落とし込むとすれば,
患者さんの運動は患者さんのものであり,
我々がつたない知識の中で患者さんの運動を
「こうして」「ああして」「意識して」訓練させてもいいものでしょうか?
我々セラピストが制御する側で,
患者さんが制御される側なのでしょうか?
そうであってはならないと思います。
患者さんの運動は,患者さん自身に組織化していってもらわなければなりません。
我々はそのための感覚を提供するだけです。
その感覚こそ,バイオメカニクスで語られる外力などであり,身体構造であると考えます。
例えば・・・・
誰しも,中学や高校時代,いろいろなスポーツ場面において,
自分が選手として試合に出場したり,友達の試合を応援した経験があるでしょう。
そんな時,どのような声をかけていただろう?
「いつも通りに!」「肩の力を抜いて!」「楽に楽に!」「意識しないで!」
こんな言葉であったに違いありません。
そう,我々は直感的に,
効率的な運動は頭で考えて力を入れて意識したのではうまくいかないことを知っています。
治療家ではない,どんな人達も知っているのです。
それが,治療場面となると…?
口頭指示を入れ,意識的に制御しようとします。
スポーツ現場であればフォーム指導というものが入るかもしれません。
しかし,歩行のフォーム指導とは…?歩行は,強力に内部モデルとして学習されています。
症例よりも人生経験の少ない私達が歩行を指導して,
制御する側になる…?
もう一度,運動を捉え直さなければなりません。
それが,我々のリハビリテーション革命なのです。
BiNI COMPLEX JAPAN 舟波真一でした。
